Inleiding tot besturingssystemen: werking, typen en toepassingen
U gebruikt besturingssystemen wanneer een machine een waarde automatisch stabiel houdt, zoals temperatuur, snelheid of niveau.In dit artikel wordt uitgelegd wat een besturingssysteem is, hoe de onderdelen ervan samenwerken en hoe feedback de uitvoer correct houdt.U zult ook de belangrijkste soorten systemen zien en hoe ze zich in bedrijf gedragen.Gemeenschappelijk gebruik, voordelen en limieten zijn inbegrepen.Catalogus
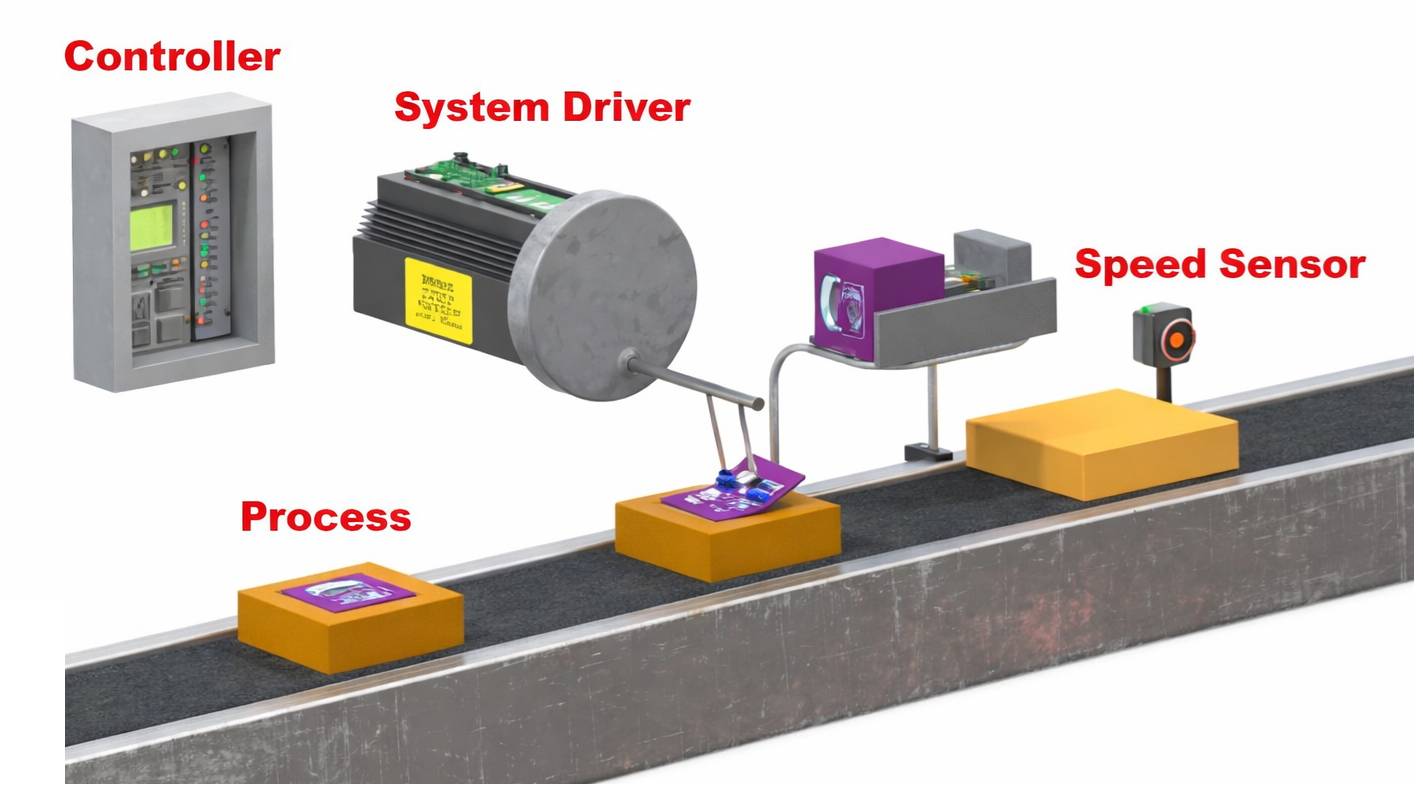
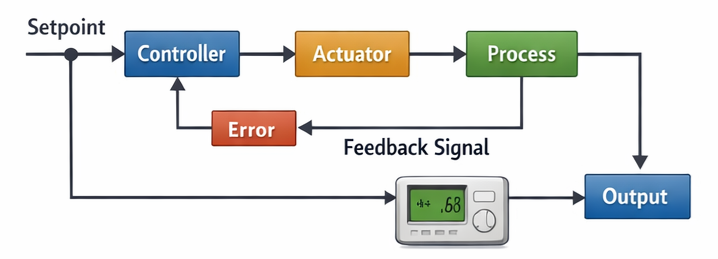
Figuur 1. Voorbeeld van een besturingssysteem
Wat is een besturingssysteem?
Een regelsysteem is een systeem dat een gemeten waarde dicht bij een gewenste doelwaarde houdt.Het doel ervan is om een proces automatisch aan te passen, zodat de output correct blijft, zelfs als de omstandigheden veranderen.Een kamerthermostaat houdt de temperatuur bijvoorbeeld dichtbij het ingestelde niveau, en een autocruisecontrol houdt het voertuig op een geselecteerde snelheid.Een watertankniveauregelaar houdt ook de waterhoogte op een gekozen merkteken.Simpel gezegd: een besturingssysteem controleert en corrigeert voortdurend een variabele zodat deze overeenkomt met de vereiste waarde.
Basiselementen van een besturingssysteem
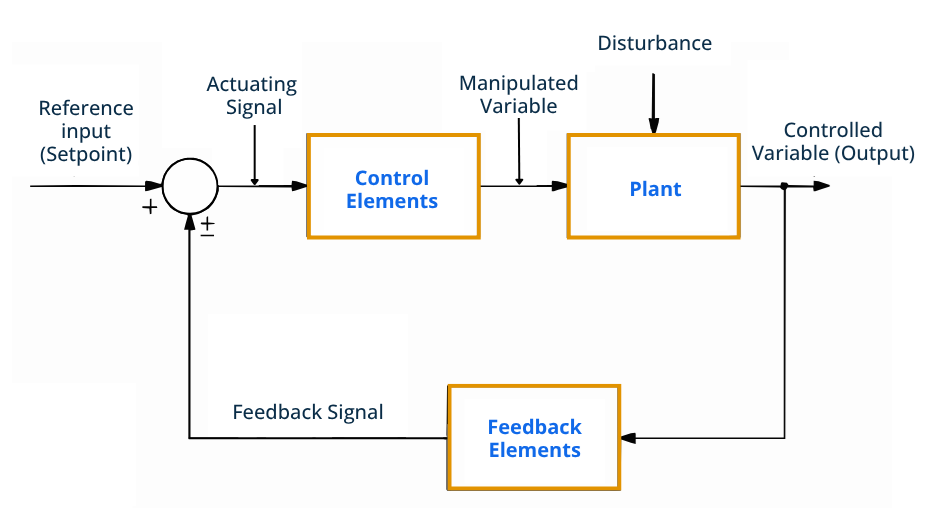
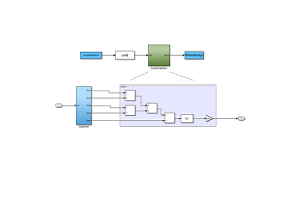
Figuur 2. Blokschema van het besturingssysteem
Een besturingssysteem bestaat uit verschillende standaardonderdelen die elk een specifieke taak uitvoeren.
• Referentie-ingang (setpoint)
Dit is de gewenste waarde die het systeem probeert te behouden.Het vertegenwoordigt de geselecteerde doelvoorwaarde.Het systeem vergelijkt altijd de werkelijke waarde met deze referentie.
• Activeringssignaal
Dit is het signaal dat wordt geproduceerd na het vergelijken van de gewenste en werkelijke waarden.Het geeft aan hoeveel aanpassing nodig is.Het signaal bereidt het systeem voor op correctie.
• Controle-elementen
Deze onderdelen verzorgen het besluitvormingsproces.Zij bepalen de corrigerende actie op basis van het ontvangen signaal.De output van deze fase bereidt het proces voor op aanpassing.
• Gemanipuleerde variabele
Dit is de instelbare hoeveelheid die naar het proces wordt gestuurd.Het wijzigen van deze waarde heeft invloed op de uiteindelijke uitvoer.Het is de variabele die het systeem direct kan variëren.
• Plant
De fabriek is het proces dat wordt gecontroleerd.Het produceert de uiteindelijke uitvoerwaarde.Het systeem streeft ernaar deze output op het gewenste niveau te houden.
• Verstoring
Dit is een ongewenste verandering die het proces beïnvloedt.Het kan de uitvoer wegduwen van de gewenste waarde.Het systeem moet dit compenseren.
• Gecontroleerde variabele (uitvoer)
Dit is het daadwerkelijke meetresultaat van het proces.Het toont de huidige toestand van het systeem.Het doel is om deze gelijk te houden aan de referentie-invoer.
• Feedbackelementen
Deze meten de output en sturen informatie terug ter controle.Zij voorzien het systeem van de huidige toestand.Hierdoor kan de correctie worden bepaald.
• Feedbacksignaal
Dit is de geretourneerde informatie over de uitvoerwaarde.Het vertegenwoordigt de toestand van het proces.Het systeem gebruikt het ter vergelijking.
Werkingsprincipe van het controlesysteem
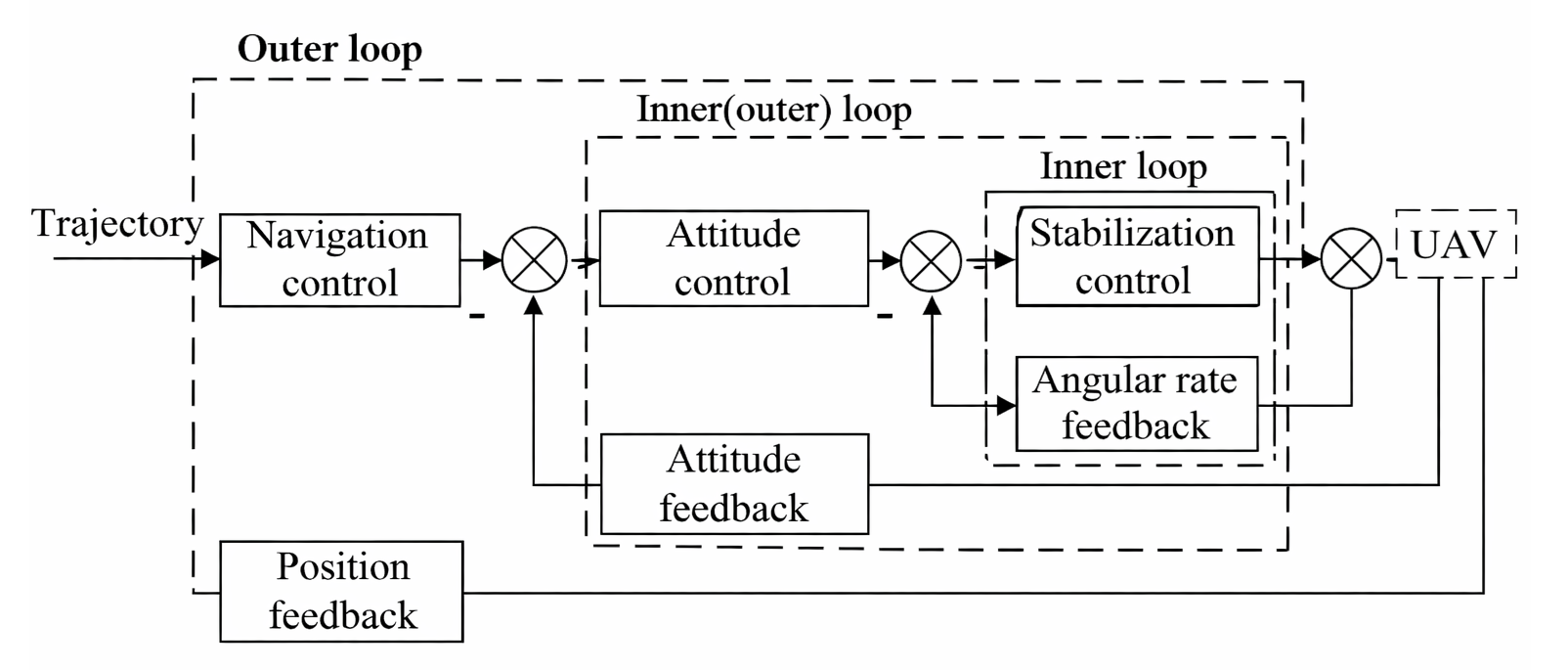
Figuur 3. Werkingsprincipe van het besturingssysteem
Het werkingsprincipe van een besturingssysteem begint met het geven van een gewenste invoerwaarde aan het systeem.Het systeem vergelijkt deze waarde vervolgens met de werkelijke uitgangswaarde.Het verschil daartussen wordt het foutsignaal genoemd.Als de fout bestaat, genereert het systeem een correctiesignaal.Deze correctie past het proces aan om de fout te verminderen.De output verandert en wordt continu opnieuw gecontroleerd.De cyclus herhaalt zich totdat de uitvoer nauw aansluit bij de gewenste waarde.
Kenmerken van besturingssystemen
Besturingssystemen worden geëvalueerd op basis van hoe goed ze tijdens bedrijf presteren.Deze kenmerken beschrijven de kwaliteit en betrouwbaarheid van de systeemreactie.
|
Kenmerken |
Beschrijving |
|
Stabiliteit |
Uitgang wel
niet uiteenlopen;keert na verstoring terug naar een stabiele waarde |
|
Nauwkeurigheid |
Uiteindelijke fout ≤
±2–5% van de ingestelde waarde |
|
Precisie |
Uitvoer
variatie ≤ ±1% onder dezelfde invoer |
|
Reactietijd
|
Initieel
reactie vindt plaats binnen de gemeten vertragingstijd (td) |
|
Stijg tijd |
Tijd vanaf 10%
tot 90% van de uiteindelijke waarde |
|
Tijd regelen |
Komt binnen en
blijft binnen de ±2%-band |
|
Overschrijding |
Piek overschrijdt
uiteindelijke waarde per % bedrag |
|
Steady-State
Fout |
Constant
offset die overblijft na stabilisatie |
|
Gevoeligheid |
ΔUitgang /
ΔParameterwijzigingsverhouding |
|
Robuustheid |
Onderhoudt
werking ondanks verstoringsverandering |
|
Bandbreedte |
Werkt
effectief tot -3 dB afsnijfrequentie |
|
Herhaalbaarheid |
Dezelfde invoer
produceert dezelfde output binnen de tolerantie |
|
Betrouwbaarheid |
Werkt
zonder uitval voor nominale bedrijfstijd (MTBF) |
|
Demping |
Oscillatie
verval bepaald door dempingsverhouding ζ |
|
Snelheid van
Reactie |
Totale tijd om
stabiele toestand bereiken |
Soorten besturingssystemen
Besturingssystemen worden geclassificeerd op basis van de manier waarop ze omgaan met informatie, signalen en reactiegedrag.Ze zijn gegroepeerd op basis van feedbackgebruik, signaalvorm en wiskundig gedrag.
Open-lus besturingssysteem
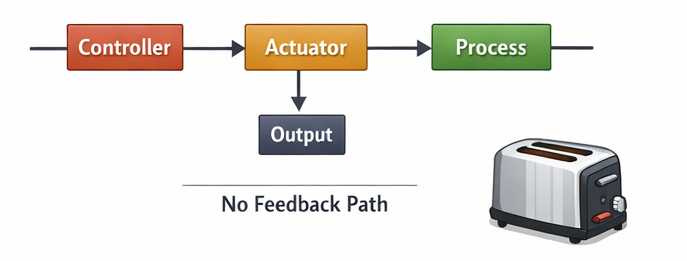
Figuur 4. Diagram met open lusbesturingssysteem
Een open-loop-regelsysteem is een systeem waarbij de output de regelactie niet beïnvloedt.Het systeem verzendt een commando en gaat ervan uit dat het resultaat correct is zonder het te controleren.Omdat er geen feedbackpad is, kunnen fouten of verstoringen niet automatisch worden gecorrigeerd.De prestaties zijn voornamelijk afhankelijk van de juiste kalibratie en bedrijfsomstandigheden.Deze systemen zijn eenvoudig, goedkoop en gemakkelijk te ontwerpen.Veranderingen in belasting of omgeving kunnen echter het eindresultaat beïnvloeden.Veel voorkomende voorbeelden zijn een timer voor een elektrische broodrooster, een timerbediening voor een wasmachine en een vaste irrigatietimer.
Gesloten regelsysteem
Figuur 5. Diagram met gesloten lusbesturingssysteem
Een closed-loop controlesysteem is een systeem dat feedback gebruikt om de output automatisch aan te passen.Het systeem meet het resultaat en vergelijkt dit met de gewenste waarde.Als er een verschil optreedt, wordt er een correctie toegepast om de fout te verkleinen.Deze continue aanpassing maakt een nauwkeurige en stabiele werking mogelijk, zelfs als de omstandigheden variëren.Gesloten-lussystemen bieden betere precisie en betrouwbaarheid dan open-lussystemen.Ze worden veel gebruikt in moderne automatische besturingstoepassingen.Typische voorbeelden zijn onder meer de temperatuurregeling van airconditioning, cruisecontrol voor voertuigen en automatische spanningsregelaars.
Continu-tijdcontrolesysteem
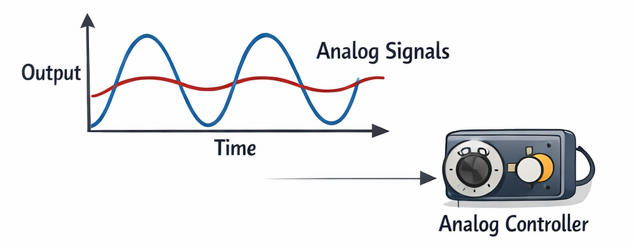
Figuur 6. Continu-tijd (analoog) stuursignaal
Een continu-tijdcontrolesysteem verwerkt signalen die in de loop van de tijd soepel veranderen.De invoer en uitvoer bestaan op elk moment zonder onderbreking.Deze systemen werken meestal met analoge elektrische of mechanische signalen.Omdat de signalen continu zijn, is de respons ook soepel en natuurlijk.Systemen met continue tijd worden vaak aangetroffen in traditionele analoge controllers.Ze zijn geschikt voor fysische processen die onmiddellijke reactie vereisen.Voorbeelden zijn onder meer analoge snelheidsregelaars, volumeregeling voor de audioversterker en hydraulische klepstandregeling.
Discreet tijdcontrolesysteem
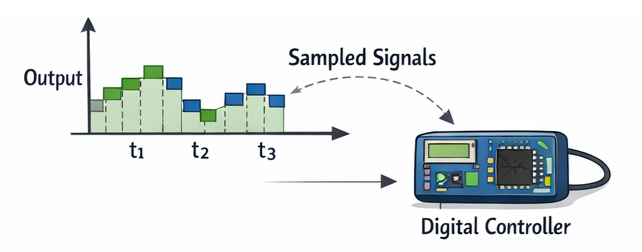
Figuur 7. Discrete tijd (digitaal) stuursignaal
Een discreet tijdcontrolesysteem werkt met behulp van bemonsterde datasignalen.Het systeem controleert en actualiseert de waarden alleen met specifieke tijdsintervallen.Deze signalen worden meestal verwerkt door digitale controllers of microprocessors.De output verandert stapsgewijs in plaats van continu.Dergelijke systemen maken programmeerbare bediening en flexibele aanpassing mogelijk.Ze worden veel gebruikt in moderne elektronische en computergebaseerde besturingen.Voorbeelden zijn onder meer op microcontrollers gebaseerde temperatuurregeling, digitale motorsnelheidsregeling en slimme huisthermostaten.
Lineair controlesysteem
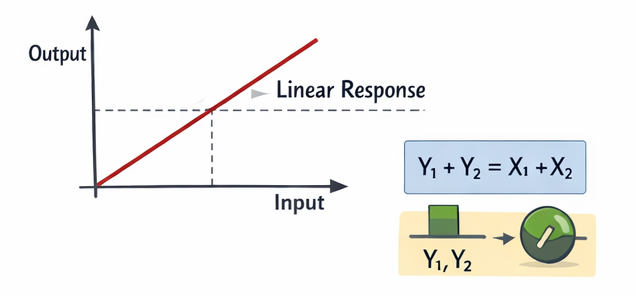
Figuur 8. Lineaire systeeminvoer-uitvoerrelatie
Een lineair besturingssysteem volgt een proportionele relatie tussen input en output.Als de input verdubbelt, verdubbelt de output ook onder dezelfde omstandigheden.Deze systemen voldoen aan het superpositieprincipe waarbij gecombineerde inputs gecombineerde outputs produceren.Lineair gedrag maakt voorspelbare en eenvoudige wiskundige analyses mogelijk.De meeste theoretische besturingsontwerpen gaan vanwege de eenvoud uit van lineaire werking.Lineaire modellen helpen bij het ontwerpen van stabiele en nauwkeurige systemen.Voorbeelden zijn onder meer elektronische versterkers met een klein signaal en motorbesturingsgebieden met lage belasting.
Niet-lineair besturingssysteem
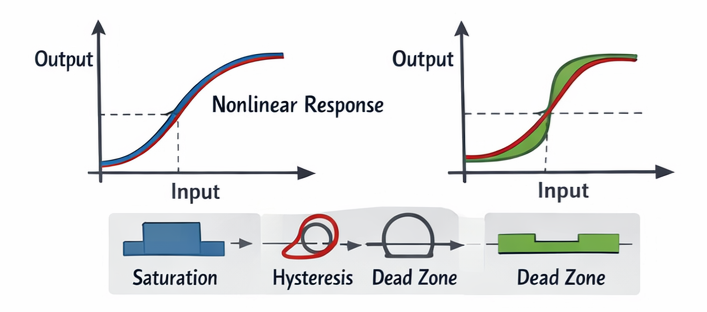
Figuur 9. Kenmerken van niet-lineaire systeemreacties
Een niet-lineair besturingssysteem heeft een output die niet evenredig is aan de input.De reactie verandert afhankelijk van het werkingsbereik of de omstandigheden.Kleine veranderingen in de input kunnen grote variaties in de output veroorzaken of helemaal geen verandering.Effecten zoals verzadiging, hysteresis en dode zones treden vaak op.Deze systemen zijn moeilijker te analyseren, maar geven fysieke processen nauwkeuriger weer.Veel systemen gedragen zich van nature op een niet-lineaire manier.Voorbeelden zijn onder meer bewegingslimieten van robotarmen, gedrag van magnetische actuatoren en klepstroomregeling op extreme posities.
Voor- en nadelen van besturingssystemen
Controlesystemen verbeteren de consistentie en verminderen handmatige inspanningen, maar brengen ook complexiteit en kosten met zich mee.
Voordelen van besturingssystemen
• Het systeem houdt de output tijdens bedrijf dicht bij de gewenste waarde.
• Operators hoeven de apparatuur niet steeds met de hand af te stellen.
• Machines kunnen lange uren draaien zonder regelmatig te stoppen.
• Het systeem corrigeert veranderingen in omstandigheden automatisch.
• De werkingsstatus kan worden gecontroleerd vanaf een paneel of extern display.
Nadelen van besturingssystemen
• De installatiekosten zijn hoger dan bij eenvoudige handmatige systemen.
• Er zijn geschoolde werknemers nodig voor de installatie en het onderhoud.
• Sensoren en elektronische onderdelen kunnen na verloop van tijd defect raken.
• Het vinden van de oorzaak van problemen kan langer duren.
• Het systeem is afhankelijk van stabiel elektrisch vermogen.
Toepassingen van besturingssystemen
Besturingssystemen worden gebruikt in zowel de industriële automatisering als in de dagelijkse apparatuur om automatisch de goede werking te behouden.
1. Industriële productie
Productiemachines behouden consistente productafmetingen en -kwaliteit.Geautomatiseerde assemblagelijnen maken gebruik van regelgeving om herhaalbaarheid te garanderen.Dit vermindert verspilling en verbetert de efficiëntie.
2. Temperatuurregeling
Verwarmings- en koelapparatuur zorgt voor comfortabele omgevingsomstandigheden.Gebouwen zijn afhankelijk van automatische aanpassingen om het binnenklimaat te stabiliseren.Dit verbetert de energie-efficiëntie en het comfort.
3. Transportsystemen
Voertuigen maken gebruik van snelheids- en stabiliteitscontrole voor een soepelere bediening.Moderne auto's zijn voorzien van cruise control en tractiesystemen.Deze verbeteren de rijveiligheid en prestaties.
4. Energiesystemen
Elektrische netwerken regelen de spannings- en frequentieniveaus.Generatoren passen de output aan om aan de belastingvraag te voldoen.Dit zorgt voor een stabiele elektriciteitsvoorziening.
5. Robotica en automatisering
Robots voeren nauwkeurige positionerings- en bewegingstaken uit.Geautomatiseerde machines werken continu met hoge precisie.Dit maakt geavanceerde productie mogelijk.
6. Medische apparatuur
Apparaten handhaven gecontroleerde bedrijfsomstandigheden tijdens de behandeling.Bewakingsapparatuur houdt de waarden binnen veilige grenzen.Dit verbetert de patiëntveiligheid en betrouwbaarheid.
7. Huishoudelijke apparaten
Alledaagse apparaten beheren automatisch de bedieningsinstellingen.Wasmachines en koelkasten zorgen voor goede werkingsomstandigheden.Dit vereenvoudigt de dagelijkse taken.
8. Lucht- en ruimtevaartsystemen
Vliegtuigen en drones zorgen voor stabiele vliegomstandigheden.Automatische begeleiding zorgt voor de juiste oriëntatie en hoogte.Dit ondersteunt betrouwbare navigatie.
Besturingssysteem versus automatisering versus ingebedde systemen
Deze technologieën zijn nauw verwant, maar dienen verschillende technische doeleinden binnen moderne elektronische en industriële producten.
|
Functie |
Controle
Systeem |
Automatisering |
Ingebed
Systeem |
|
Hoofdfocus |
Regeling van
variabelen |
Proces
uitvoering |
Apparaat
operatie |
|
Doel |
Onderhouden
gewenste waarde |
Voer taken uit
automatisch |
Voer toegewijd uit
functies |
|
Reikwijdte |
Specifiek
procesgedrag |
Geheel
werkstroom
|
Enkel
productapparaat |
|
Besluit
Vermogen |
Gebaseerd op
gemeten waarden |
Gebaseerd op
geprogrammeerde logica |
Gebaseerd op
firmware |
|
Feedbackgebruik |
Vaak
vereist |
Optioneel |
Optioneel |
|
Hardwaretype |
Sensoren en
actuatoren |
Machines en
controleurs |
Microcontroller
bord |
|
Softwarerol |
Berekening
en correctie |
Sequencing
en coördinatie |
Apparaat
controle logica |
|
Reactietype |
Continu
aanpassing |
Taak
uitvoering |
Functionele werking |
|
Systeemgrootte |
Klein tot
middelmatig |
Gemiddeld tot
groot |
Heel klein |
|
Flexibiliteit |
Matig |
Hoog |
Beperkt |
|
Tijd
Vereiste |
Hoog |
Matig |
Hoog |
|
Toepassing
Niveau |
Procesniveau |
Plantniveau |
Productniveau |
|
Voorbeeld |
Temperatuur
controle |
Fabriek
productielijn |
Slim horloge |
|
Integratie |
Onderdeel van
automatisering |
Bevat
besturingssystemen |
Ondersteunt beide |
Conclusie
Besturingssystemen handhaven de stabiliteit door de werkelijke output voortdurend te vergelijken met een doelwaarde en eventuele fouten te corrigeren.Hun prestaties zijn afhankelijk van kernelementen zoals feedback, controlleractie en het gecontroleerde proces.Verschillende classificaties bepalen hoe signalen worden afgehandeld en hoe nauwkeurig een systeem reageert op verstoringen.Vanwege deze mogelijkheden worden besturingssystemen op grote schaal toegepast in de industrie, transport, energie, medische apparatuur en alledaagse apparatuur.
Over ons
ALLELCO LIMITED
Lees verder
Quick Inviry
Stuur een aanvraag, we zullen onmiddellijk reageren.
Veel Gestelde Vragen [FAQ]
1. Wat is het verschil tussen een controller en een besturingssysteem?
Een controller is slechts het beslissingsapparaat (zoals een PLC of PID-controller).Een besturingssysteem omvat de controller plus sensoren, actuatoren en het proces dat wordt geregeld.
2. Wat is PID-regeling en waarom is het belangrijk?
PID-regeling maakt gebruik van proportionele, integrale en afgeleide acties om fouten snel en soepel te minimaliseren.Het verbetert de stabiliteit, nauwkeurigheid en reactiesnelheid in de meeste industriële systemen.
3. Waarom oscilleren of jagen besturingssystemen soms?
Oscillatie treedt op wanneer correcties te agressief of vertraagd zijn.Slechte afstemming, trage sensoren of overmatige versterking zorgen ervoor dat de uitvoer herhaaldelijk voorbijschiet.
4. Wat is actuatorverzadiging?
Actuatorverzadiging vindt plaats wanneer de actuator zijn fysieke limiet bereikt en de output niet verder kan verhogen.Dit voorkomt dat het systeem grote fouten corrigeert.
5. Hoe gaan besturingssystemen om met vertragingen in processen?
Ze gebruiken afstemmingsmethoden, filters of voorspellende algoritmen om vertraging te compenseren, zodat de correctie op het juiste moment plaatsvindt.

4,7 kΩ-weerstandsgids: kleurcode, gebruik, testen en waardevergelijking
Op 2026/02/16

Miniatuur stroomonderbreker (MCB): werkingsprincipe, typen, nominale waarden en selectiegids
Op 2026/02/15
Populaire berichten
-

Complexe instructieset computers: hoe ze de computer hebben gewijzigd?
Op 8000/04/17 147721
-

USB-C-pinout en functies
Op 2000/04/17 111797
-
Met behulp van Xilinx Unified Simulation Primitives: een uitgebreide gids voor FPGA -ontwerp en simulatie
Op 1600/04/17 111330
-

Voedingsspanningen in elektronica: betekenis van VCC, VDD, VEE, VSS en GND
Op 0400/04/17 83660
-

RJ45 -connectorhandleiding: pinout, bedrading, kabeltypen en gebruik
Op 1970/01/1 79390
-

De ultieme gids voor draadkleurcodes in moderne elektrische systemen
De manier waarop onze elektrische systemen kleuren gebruiken, is niet alleen voor uiterlijk.Elke draadkleur geeft nu een specifieke functie aan, waardoor het gemakkelijker wordt om elektrische comp...Op 1970/01/1 66812
-

Kwaliteit (Q) Factor: vergelijkingen en toepassingen
De kwaliteitsfactor, of 'Q', is belangrijk bij het controleren hoe goed inductoren en resonatoren werken in elektronische systemen die radiofrequenties gebruiken (RF).'Q' meet hoe goed een circuit ...Op 1970/01/1 62969
-

PURGE VLEP GIDS: Functie, symptomen, testen en vervanging voor optimale motorprestaties
De Purge -klep is een belangrijk onderdeel van het systeem van een auto dat helpt de lucht schoon te houden door brandstofdampen te beheren voordat ze in de atmosfeer kunnen ontsnappen.Dit helpt ni...Op 1970/01/1 62871
-

Piekprestaties bereiken met de maximale stelling van de stroomoverdracht
De maximale stelling van de stroomoverdracht legt uit hoe energie van een bron, zoals een batterij of generator, naar een aangesloten belasting stroomt.Het toont de exacte voorwaarde waar de belast...Op 1970/01/1 54051
-

A23 Batterijspecificaties en compatibiliteit
De A23-batterij is een kleine, cilindervormige batterij met hoge spanning.Ook wel 23A, 23ae of MN21 genoemd, het loopt op 12 volt en veel hoger dan AA- of AAA -batterijen.Het speciale ontw...Op 1970/01/1 52032
Heet onderdeelnummer
-

LCA129STR
IXYS Integrated Circuits Division
SSR RELAY SPST-NO 170MA 0-250V
CC0402JRX5R6BB104
YAGEO
CAP CER 0.1UF 10V X5R 0402
MC32PF4210A2ES
NXP USA Inc.
PF4210
DS90UB304TRHSRQ1
Texas Instruments
PROTOTYPE
BZX84C15
Diotec Semiconductor
DIODE ZENER 15V 300W SOT23-3
74LVX245MTR
STMicroelectronics
IC TXRX NON-INVERT 3.6V 20SO
LM70CILD-5
Texas Instruments
SENSOR DIGITAL -55C-150C 8WSON
LT8390IFE#PBF
Analog Devices Inc.
IC REG CTRLR BUCK/BOOST 28TSS
BZD27C30P-E3-08
Vishay General Semiconductor - Diodes Division
DIODE ZENER 30V 800MW DO219AB
TPS76333DBVT
Texas Instruments
IC REG LINEAR 3.3V 150MA SOT23-5
SN1111046DQCR
Texas Instruments
PROTOTYPE
KRM55WC71E107MH13K
Murata Electronics
CAP CER MLCC
HSMS-C190
Broadcom Limited
LED RED DIFFUSED CHIP SMD
W25N02KVZEIR
Winbond Electronics
IC FLASH 2GBIT SPI/QUAD 8WSON
BGU8052X
NXP USA Inc.
IC AMP GSM 1.5GHZ-2.5GHZ 8HWSON
NC7WP14P6X
onsemi
IC INVERT SCHMITT 2CH 2-INP SC88
0154007.DRT
Littelfuse Inc.
FUSE BRD MNT 7A 72VAC 60VDC 2SMD
SMAJ64CA-E3/61
Vishay General Semiconductor - Diodes Division
TVS DIODE 64VWM 103VC DO214AC -

G3VM-WL
Omron Electronics Inc-EMC Div
SSR RELAY SPST-NO 120MA 0-350V
LTC1144IS8#TRPBF
Analog Devices Inc.
IC REG CHARG PUMP INV 50MA 8SOIC
BR24T128NUX-WTR
Rohm Semiconductor
IC EEPROM 128KBIT VSON008X2030
MAX1617AMEE+
Analog Devices Inc./Maxim Integrated
SENSOR DIGITAL -55C-125C 16QSOP
DR1050-821-R
Eaton - Electronics Division
FIXED IND 820UH 540MA 1.481 OHM
HFA30TA60CS
Vishay General Semiconductor - Diodes Division
DIODE ARRAY GP 600V 15A D2PAK
LT5400ACMS8E-4#PBF
Analog Devices Inc.
RES ARRAY 4 RES 1K OHM 8TSSOP
AP7341D-11FS4-7
Diodes Incorporated
IC REG LINEAR 1.1V 300MA 4DFN
CGA5L3X8R1E225M160AB
TDK Corporation
CAP CER 2.2UF 25V X8R 1206
ESD101B102ELE6327XTMA1
Infineon Technologies
TVS DIODE 5.5VWM 30VC TSLP-2-20
GRM0335C1H5R6DA01D
Murata Electronics
CAP CER 5.6PF 50V C0G/NP0 0201
SMCJ40A-E3/57T
Vishay General Semiconductor - Diodes Division
TVS DIODE 40VWM 64.5VC DO214AB
RT1206BRE074K3L
YAGEO
RES SMD 4.3K OHM 0.1% 1/4W 1206
XC7Z045-2FFG676I
AMD
IC SOC CORTEX-A9 800MHZ 676FCBGA
MAX2082CXD+
Analog Devices Inc./Maxim Integrated
IC TXRX RS232 5V 336CSBGA
MPC5200VR400B
NXP USA Inc.
IC MPU MPC52XX 400MHZ 272BGA
OPA615IDR
Texas Instruments
IC AMP DC RESTORATION 14SOIC
BCM11131IFEBG
Broadcom Limited
MAP/AP-ONLY -

M29F400BT70N6E
Micron Technology Inc.
IC FLASH 4MBIT PARALLEL 48TSOP
8EWS08STRL
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 800V 8A DPAK
BCM5482SHA2IFB
Broadcom Limited
DUAL PORT 10/100/1000BASE-T PH
LMP7732MME
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8VSSOP
GRM1885C1H4R0BA01D
Murata Electronics
CAP CER 4PF 50V C0G/NP0 0603
TL1451CN
Texas Instruments
IC REG CTRLR BCK/BST/FLYBK 16DIP
BR24L04-W
Rohm Semiconductor
IC EEPROM 4KBIT I2C 400KHZ 8DIP
MIC29301-3.3WU-TR
Microchip Technology
IC REG LINEAR 3.3V 3A TO263-5
CL21B331JBANNNC
Samsung Electro-Mechanics
CAP CER 330PF 50V X7R 0805
STM32F746VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
F781901AAL
Texas Instruments
PROTOTYPE
DSC7505R0L
Panasonic Electronic Components
TRANS NPN 20V 3A MINIP3
FH33-4S-1SH(99)
Hirose Electric Co Ltd
CONN FFC FPC BOTTOM 4POS 1MM R/A
LT1637CDD#PBF
Analog Devices Inc.
IC OPAMP GP 1 CIRCUIT 8DFN
MT41K256M16TW-107 XIT:P
Micron Technology Inc.
IC DRAM 4GBIT PAR 96FBGA
USBULC6-2M6
STMicroelectronics
TVS DIODE 5VWM 17VC 6UQFN
NGB8204NT4G
onsemi
IGBT 430V 18A 115W D2PAK
TPS54424RNVR
Texas Instruments
IC REG BUCK ADJUSTABLE 4A 18VQFN